- · 《激光杂志》栏目设置[08/03]
- · 《激光杂志》数据库收录[08/03]
- · 《激光杂志》投稿方式[08/03]
- · 《激光杂志》征稿要求[08/03]
- · 《激光杂志》刊物宗旨[08/03]
一、本刊要求作者有严谨的学风和朴实的文风,提倡互相尊重和自由讨论。凡采用他人学说,必须加注说明。 二、不要超过10000字为宜,精粹的短篇,尤为欢迎。 三、请作者将稿件(用WORD格式)发送到下面给出的征文信箱中。 四、凡来稿请作者自留底稿,恕不退稿。 五、为规范排版,请作者在上传修改稿时严格按以下要求: 1.论文要求有题名、摘要、关键词、作者姓名、作者工作单位(名称,省市邮编)等内容一份。 2.基金项目和作者简介按下列格式: 基金项目:项目名称(编号) 作者简介:姓名(出生年-),性别,民族(汉族可省略),籍贯,职称,学位,研究方向。 3.文章一般有引言部分和正文部分,正文部分用阿拉伯数字分级编号法,一般用两级。插图下方应注明图序和图名。表格应采用三线表,表格上方应注明表序和表名。 4.参考文献列出的一般应限于作者直接阅读过的、最主要的、发表在正式出版物上的文献。其他相关注释可用脚注在当页标注。参考文献的著录应执行国家标准GB7714-87的规定,采用顺序编码制。
激光雷达上车之后,对辅助驾驶的帮助到底有多
作者:网站采编关键词:
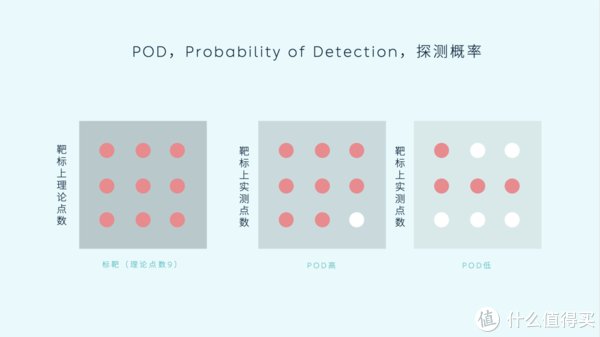
摘要:白剑博士毫不谦虚地说:「目前蔚来这款激光雷达的 POD 表现是业界最好的,很多激光雷达的 POD 值都远低于这个水平」。 下图的展示非常直观: 另外,当对向来车的远光灯对人类造成
白剑博士毫不谦虚地说:「目前蔚来这款激光雷达的 POD 表现是业界最好的,很多激光雷达的 POD 值都远低于这个水平」。
下图的展示非常直观:

另外,当对向来车的远光灯对人类造成干扰时,激光雷达却丝毫不受影响,并且能够清楚地描述会人的轮廓。
蔚来 ET7 激光雷达看得远还有另一个重大原因,那就是「瞭望塔」布局。
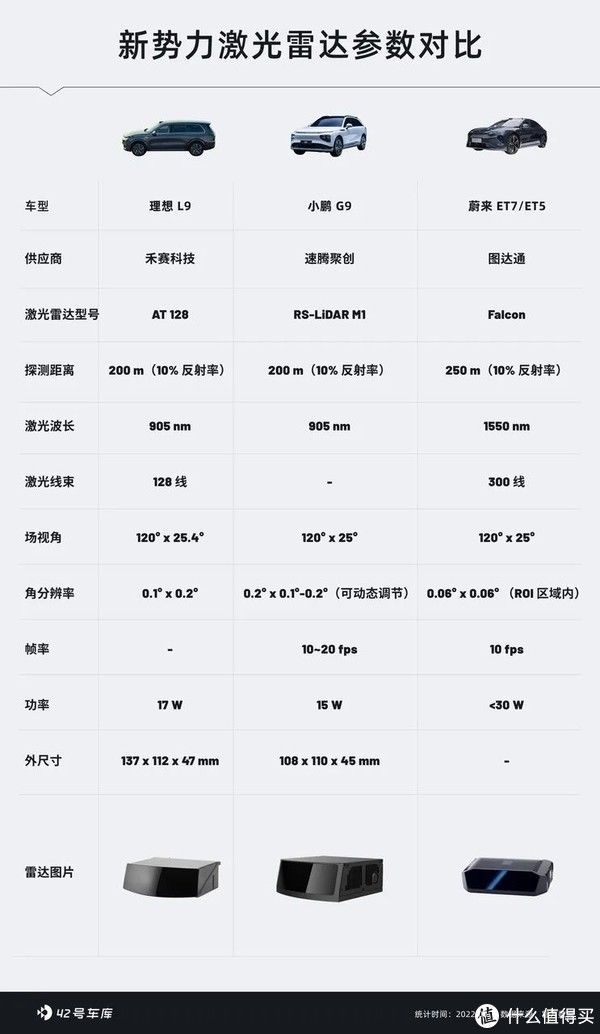
小鹏 G9 与理想 L9 所搭载的速腾聚创 M1 、禾赛 AT128 在 10% 的反射率下,最远探测距离均是 200 米,相较于 ET7 搭载的「猎鹰」确实有着 50 米的差距。

这又是一个视觉的弱势场景,大家可以想象人眼在夜间感知的状态。
显然,在计算机视觉发展还不算非常成熟的今天,激光雷达与摄像头可以依靠各自的特性,对辅助驾驶的感知系统进行简单粗暴的互补。
这就像是买房都看得房率,相同的面积,得房率越高住着自然越舒适,激光雷达也是如此。蔚来 ET7 搭载的激光雷达接受率能够达到 90%。
在蔚来的官方宣传中,这颗激光雷达等效 300 线,角分辨率高达 0.06*0.06,但后续也有很多人对这个数据提出了很多质疑,认为这颗雷达达不到这样的参数。
岚图 Free 也搭载了增强夜视的红外摄像头,但是这颗摄像头并没有接入 ADAS 系统,只能给驾驶员提供夜市视角用以辅助。
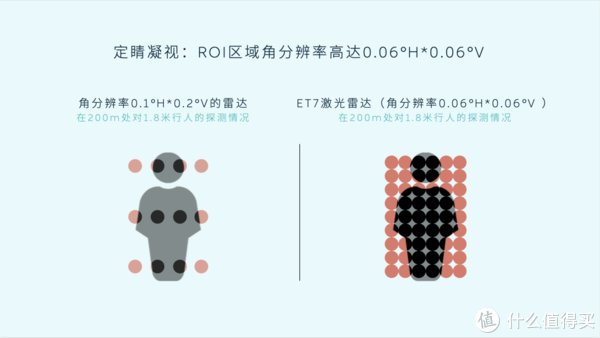
我们同样再举个例子,同样是一个 200 米处的 1.8 米成年人,不同角分辨率的雷达所探测的图像有着显著的差异:
但现阶段,在工程师的努力下系统只「认识」常规的「车道线」、「轿车、货车的车尾」、「行人」、「两轮车」,所以对于视觉不认识的物体,系统自然不会做出任何反应,这也是辅助驾驶撞「白色侧翻货车」或者撞「施工路牌」的根本原因。


速腾聚创 M1 的「凝视」功能名为「凝视 GAZE」,该功能开启后,M1 ROI 区域内的分辨率将从 0.2 提高到 0.1。点云密度的翻倍提升,能够显著提升系统的感知能力。
白剑博士称,自动驾驶模仿的是人类驾驶行为,那么传感器的角色实际上就是充当人类的眼睛。人眼具备变焦功能,那么他们同样赋予激光雷达类似的功能。ET7 激光雷达可在行车关键区域,增加更多的点,从而让提高核心部分的成像质量。
最近蔚来汽车举办了一场线上沙龙,会上分享了这颗激光雷达所有的技术信息,而出席这次活动的还有担任蔚来汽车智能硬件副总裁的白剑博士。
在 ROI 区域内,ET7 的角分辨率高达 0.06*0.06,覆盖角度达到了 40H(横向)*9.6V(纵向)。另外,「定睛凝视」功能原本可以通过系统设置打开和取消,但是经过大规模的测试验证后,蔚来认为这个功能非常重要,也能体现产品优势,所以系统会默认打开这个功能。
蔚来的这种做法在行业里并不是唯一,小鹏 G9 所搭载的速腾聚创 M1 也有相同的功能。
夜间场景下,摄像头与人眼只能依赖车辆灯光和周围环境光,但是这仍然会有很多视觉死角和盲区。尤其是,对向行驶车辆的光源直射,或者是行驶至测速仪龙门架下方时,探照灯射出的强烈光线会导致人眼和摄像头瞬间致盲。

首先我们可以明确一点,蔚来这颗雷达可以做到这样的参数,但是并不能在 120 x 25 全域实现,只有中间的 40 x 9.6 可以做到,这就是 ET7 激光雷达所具备的 ROI 「定睛凝视」功能。
而高速场景下,激光雷达能取代多少摄像头的任务则成了激光雷达能否「上位」的关键因素。
但是激光雷达就不一样了,这种基于距离的感知方式,能够通过点云数据分析物体的 3D 信息,从而分析这些异物是否会影响车辆通行。
蔚来为了让激光雷达充分发挥优势,不惜将激光雷达这种不常见的传感器安装在车顶。ET7 亮相之初,奇特的造型确实有点「挑战审美」的感觉。但是随着交付量的提升以及在威马 M7 这类同行的衬托下,ET7 的造型正在逐步被大众接受。从实际效果来看,ET7 的前向感知距离确实比预期更远。
文章来源:《激光杂志》 网址: http://www.jgzzzz.cn/zonghexinwen/2022/0725/2065.html